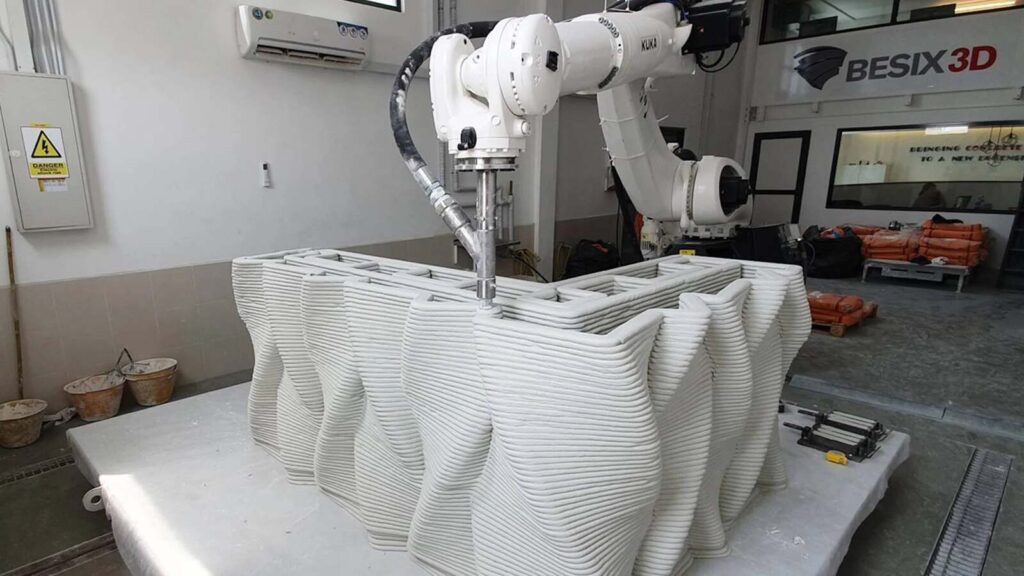
Robot Control System for 3D Concrete Printing Based on an Open PLC. We frequently find industrial six-axis robotic arms or gantry robots in industrial applications connected to 3D concrete printing technology, the employment of which may not be totally appropriate for this technology. The kinematic structure of the aforementioned robots is typically not directly optimized […]
Category Archives: Robot
06
Apr
Apr
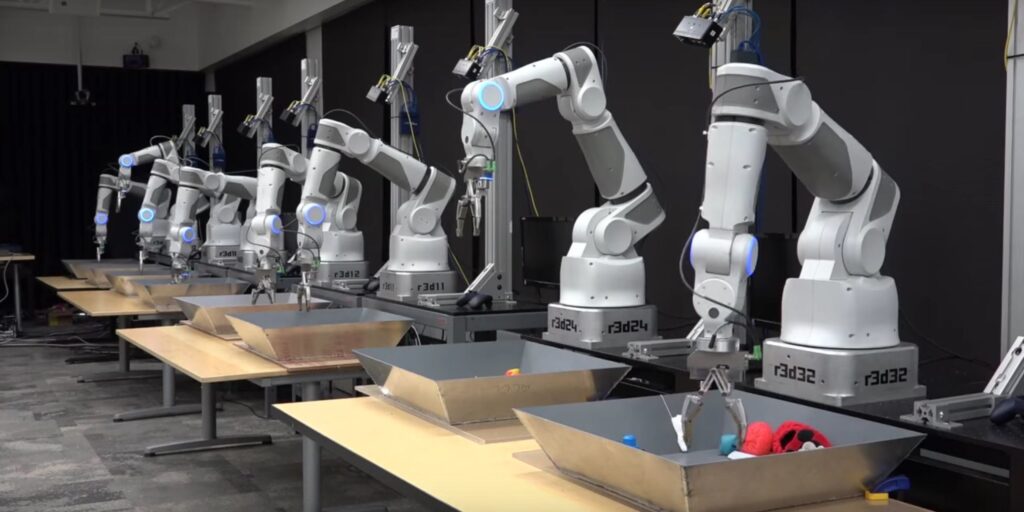
Design of Low-Cost Lightweight Robots Using Computational Systems Current industrial robots make automation more cost-effective by delivering consistent performance for high-volume manufacturing over lengthy durations. However, as the trend towards mass customization continues, specialist industrial robots are frequently acquired and set up for low-volume procedures, rising the overall cost of operation. Furthermore, traditional industrial robots […]

06
Apr
Apr
Robotic Arm Gripper Designs, the capacity of robots to hold and move items has been critical to their growth. Manufacturers may gain the benefits of precision, performance, and productivity by adopting end-effector equipment for selecting, putting, and packaging products. Grippers are classed based on their design, power source, and application. When it comes to industrial […]

06
Apr
Apr
Robotic Gripper Construction Introduction Robotic gripper Manufacturing processes in all disciplines are getting increasingly automated as technology advances. With growing productivity demands and recent advancements in cobot programming ease, industrial robots and cobots are becoming a reality in many production areas. Regardless of the task at hand, all robots require an end effector to complete […]