How to Set Servo Drive Operation Parameters for Optimal Performance
Understanding Servo Drive Operation Parameters
Servo drive operation parameters control various aspects of the motor’s performance, including speed, position, and torque. Key parameters include:
- Speed Settings: Determine the motor’s rotational speed.
- Torque Settings: Manage the motor’s torque output
- Position Settings: Control the motor’s position accuracy.
- Acceleration and Deceleration: Define how quickly the motor reaches or decreases speed.
- Gain Settings: Affect the responsiveness and stability of the servo system.

Step 1: Preliminary Preparations
1.1 Gather Required Materials
- Servo motor
- Servo drive
- Power supply
- Control system (e.g., PLC, microcontroller)
- Communication cable (USB, RS232, or Ethernet)
- Servo drive configuration software (provided by the manufacturer)
- User manual and datasheets for the servo motor and drive

1.2 Safety Precautions
- Ensure all power is off before making connections.
- Follow manufacturer guidelines and safety instructions.
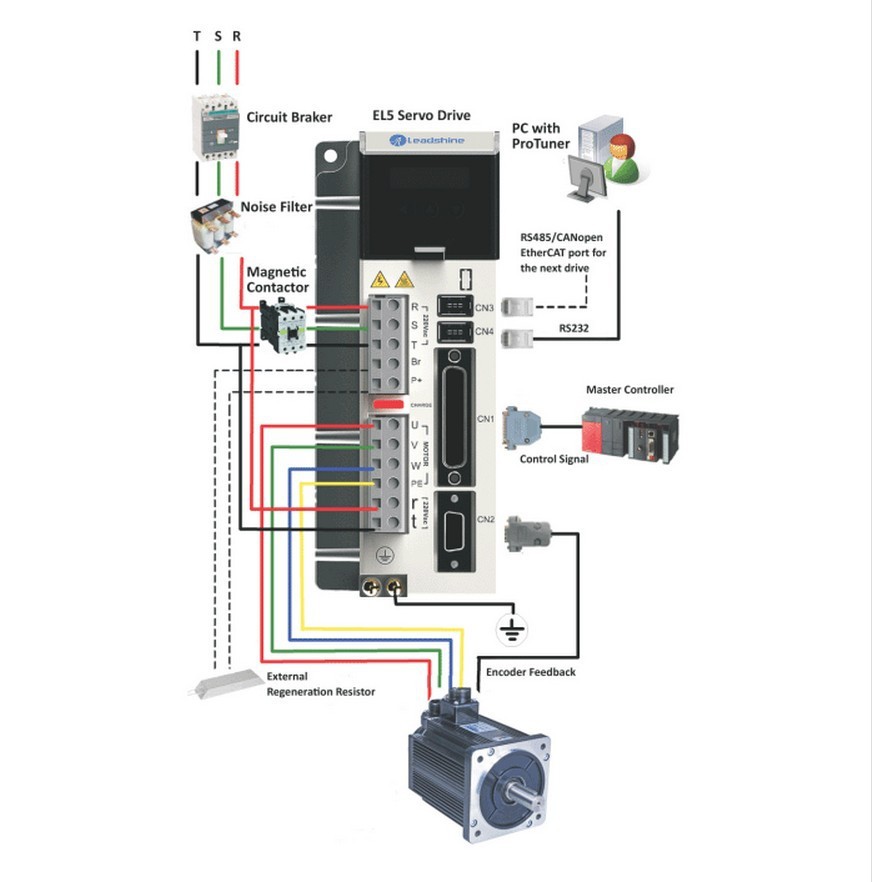
Step 2: Servo Drive Hardware Connections
2.1 Connect Power Wires
- Connect the power wires (U, V, W) from the servo motor to the corresponding terminals on the servo drive.
- Connect the drive to the appropriate power supply, ensuring the voltage and current ratings match the drive specifications.
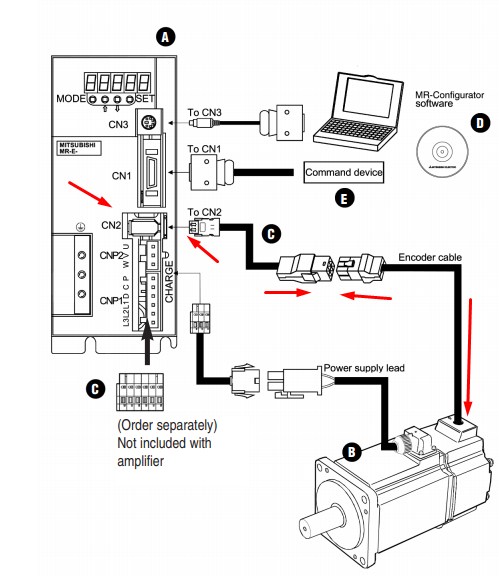
2.2 Connect Feedback Wires
- Connect the encoder or resolver feedback wires from the servo motor to the feedback input terminals on the drive.
2.3 Connect Control Wires
- Connect the control input terminals of the drive to the control system (PLC, microcontroller).
Step 3: Installing and Setting Up the Software
3.1 Install Configuration Software
- Install the servo drive configuration software on your computer. This software is usually provided by the drive manufacturer.
3.2 Connect to the Drive
- Use a communication cable (USB, RS232, or Ethernet) to connect your computer to the servo drive.
Step 4: Initial Configuration in the Software
4.1 Launch the Software
- Open the servo drive configuration software on your computer.
4.2 Establish Connection
- Follow the software prompts to establish a connection with the servo drive. Ensure that the software recognizes the drive model and firmware version..

Step 5: Setting Servo Drive Operation Parameters
Setting the operation parameters for your servo drive is crucial to ensure that your servo motor performs optimally and meets the requirements of your application. This step involves configuring motor-specific settings, control modes, safety limits, and other parameters using the servo drive’s configuration software. Here’s a detailed guide on how to set these parameters:
1. Speed Parameters
Description: Speed parameters control the rotational speed of the servo motor.
Parameters to Set:
- Maximum Speed: Defines the highest speed the motor can achieve.
- Minimum Speed: Specifies the lowest speed the motor can operate at.
- Speed Loop Gain: Adjusts the responsiveness of the motor to speed changes.
Tips:
- Ensure the maximum speed is within the motor’s rated limits to avoid damage.
- Set appropriate speed loop gain to balance responsiveness and stability.
2. Torque Parameters
Description: Torque parameters control the force generated by the servo motor.
Parameters to Set:
- Maximum Torque: Limits the maximum torque output of the motor.
- Torque Limit: Sets a threshold to prevent the motor from exceeding safe torque levels.
- Torque Control Mode: Enables direct control over the motor’s torque output.
Tips:
- Set the maximum torque below the motor’s rated torque to ensure safe operation.
- Use torque limit settings to protect the motor and mechanical components from overload.
3. Position Parameters
Description: Position parameters govern the motor’s position control, crucial for applications requiring precise positioning.
Parameters to Set:
- Position Loop Gain: Adjusts the motor’s response to position errors.
- Position Offset: Compensates for any mechanical misalignment in the system.
- Homing Settings: Defines the procedure for the motor to find its reference or home position.
Tips:
- Fine-tune the position loop gain to achieve a balance between accuracy and stability.
- Use position offset to correct any initial positioning errors.
4. Acceleration and Deceleration Parameters
Description: These parameters control the rate at which the motor speeds up or slows down.
Parameters to Set:
- Acceleration Time: Defines the time taken for the motor to reach its set speed from a standstill.
- Deceleration Time: Specifies the time taken for the motor to stop from its set speed.
- Jerk Control: Limits the rate of change of acceleration to ensure smooth motion.
Tips:
- Set acceleration and deceleration times according to the application requirements to avoid mechanical stress.
- Use jerk control to minimize sudden changes in motion, enhancing system smoothness.
Steps to Set Servo Drive Operation Parameters
Step 1: Access the Servo Drive Interface
- Connect the Drive: Use the appropriate communication interface (USB, Ethernet, RS232, etc.) to connect your servo drive to a computer or control panel.
- Launch Software: Open the manufacturer’s software or interface tool for configuring the servo drive.
Step 2: Configure Basic Settings
- Motor Type: Select the correct motor type from the settings menu.
- Feedback Device: Set up the feedback device (encoder, resolver) to ensure accurate position and speed feedback.
Step 3: Set Speed Parameters
- Navigate to the speed settings section.
- Enter the maximum and minimum speed values.
- Adjust the speed loop gain to optimize performance.
Step 4: Set Torque Parameters
- Access the torque settings menu.
- Set the maximum torque and torque limit values.
- Enable torque control mode if required and adjust accordingly.
Step 5: Configure Position Parameters
- Open the position settings section.
- Adjust the position loop gain and enter any necessary position offset values.
- Configure homing settings to establish a reference position for the motor.
Step 6: Adjust Acceleration and Deceleration Parameters
- Navigate to the acceleration/deceleration settings.
- Enter the desired acceleration and deceleration times.
- Enable and set jerk control parameters if available.
Step 7: Save and Test
- Save all settings to the servo drive.
- Perform test runs to verify that the parameters are correctly set and the system operates as expected.
- Make fine adjustments based on the test results to optimize performance.
Best Practices
- Refer to Manufacturer’s Documentation: Always consult the servo drive and motor manufacturer’s documentation for specific parameter settings and recommendations.
- Incremental Adjustments: Make incremental adjustments to parameters and test the system after each change to avoid large errors.
- Safety First: Ensure all safety protocols are in place when configuring and testing servo drives to prevent accidents and equipment damage.
- Regular Monitoring: Continuously monitor the servo system’s performance and adjust parameters as necessary to maintain optimal operation.
Conclusion
Setting servo drive operation parameters correctly is crucial for achieving the desired performance and efficiency of your servo system. By understanding and carefully configuring speed, torque, position, and acceleration/deceleration parameters, you can ensure that your servo motor operates smoothly and meets the specific needs of your application. Regular maintenance and monitoring further enhance the reliability and longevity of the servo system.
FAQs
- What should I do if my servo motor is not responding correctly after setting parameters?
- Recheck the parameter settings, ensure all connections are secure, and consult the manufacturer’s documentation for troubleshooting tips.
- Can I use the same parameter settings for different applications?
- Parameter settings should be tailored to each specific application to ensure optimal performance and avoid damage to the motor and drive.
- How often should I review and adjust servo drive parameters?
- Regularly review parameters during routine maintenance and whenever changes are made to the system or application requirements.
Excuse, that I interrupt you.